
Helicommand HC3 Xtreme
Firma Robbe uvedla na trh další zařízení značky Helicommand, tentokrát čistě pro bezpádlové systémy vrtulníků – Helicommand HC3 Xtreme. Zařízení plní dvě funkce – plně nahrazuje mechanickou stabilizaci pomocí tzv. padel, a zároveň v sobě obsahuje gyroskop pro řízení ocasní vrtulky. Umí stabilizovat vrtulníky s dvoulistými, ale i vícelistými rotory. Určen je jak pro elektrovrtulníky, tak i pro vrtulníky se spalovacím, nebo turbínovým motorem.

Zařízení je dodáváno v celkem zajímavém obalu – plechové krabičce. Taktéž konfigurační program je dodán na jiném médiu, než bývá zvykem, a to na USB klíčence.
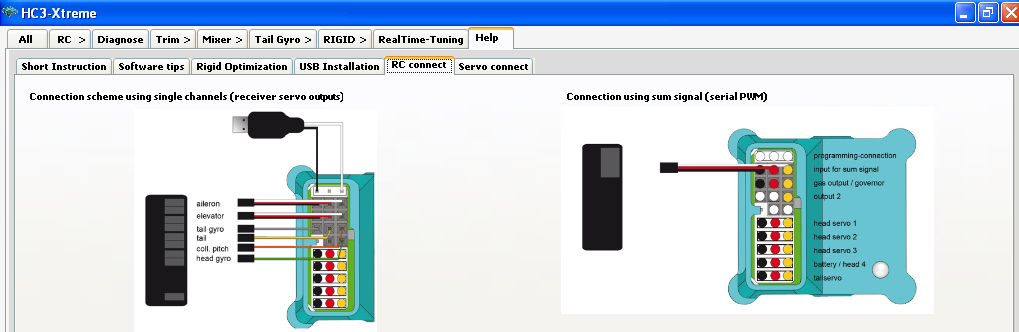
Helicommand lze připojit k přijímači buď klasickým způsobem jednotlivých konektorů kanálů, nebo v případě některých Futaba přijímačů pomocí sběrnice S-bus, tedy jediným káblíkem (obr. Help). Taktéž je avizována možnost budoucího připojení satelitů Spektrum. V obou posledních případech je ale myšleno i na připojení serva plynu, které lze zapojit přímo do Helicommandu.
Serva lze použít analogová i digitální, a na vrtulku i speciální serva s impulsem 760us – vše se dá nastavit pomocí programu z počítače. Rozsah napájení je udáván 4-10V, zařízení lze tedy přímo napájet ze dvou lipolek.
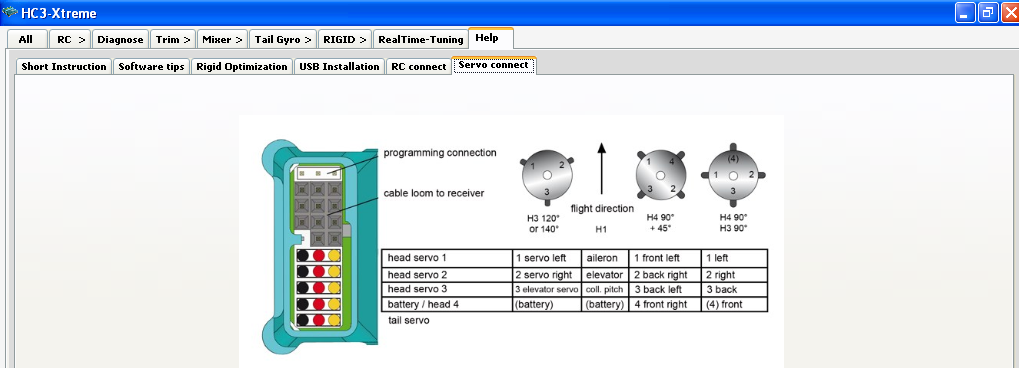
Helicommand umí ovládat všechny obvyklé druhy desek cykliky CCPM 120 a CCPM140° nevyjímaje (viz obr. Help_servo_connect). Udávané rychlosti rotace jsou max. 500°/sec pro klonění a klopení, a 650°/sec pro vrtulku.
Helicommand lze dálkově ovládat dvěma kanály. Jeden ovládá zisk bezpádlového systému, druhý zisk gyroskopu vrtulky. Dosti unikátní vlastností však je, že kanálem pro řízení zisku gyroskopu za jistých okolností nastavovat za letu i důležité parametry Helicommandu.
Základní i detailní nastavení Helicommandu se provádí pomocí programu z počítače po USB kabelu. První inicializaci lze nastavovat samozřejmě po jednotlivých parametrech samostatně, nebo lépe, spustit jednoduchého průvodce nastavením, který velice ulehčí a zrychlí uvedení do provozu na novém vrtulníku.
Nastavovací menu jsou tato:
1. All – odsud lze spustit průvodce nastavováním (obr. ALL.)

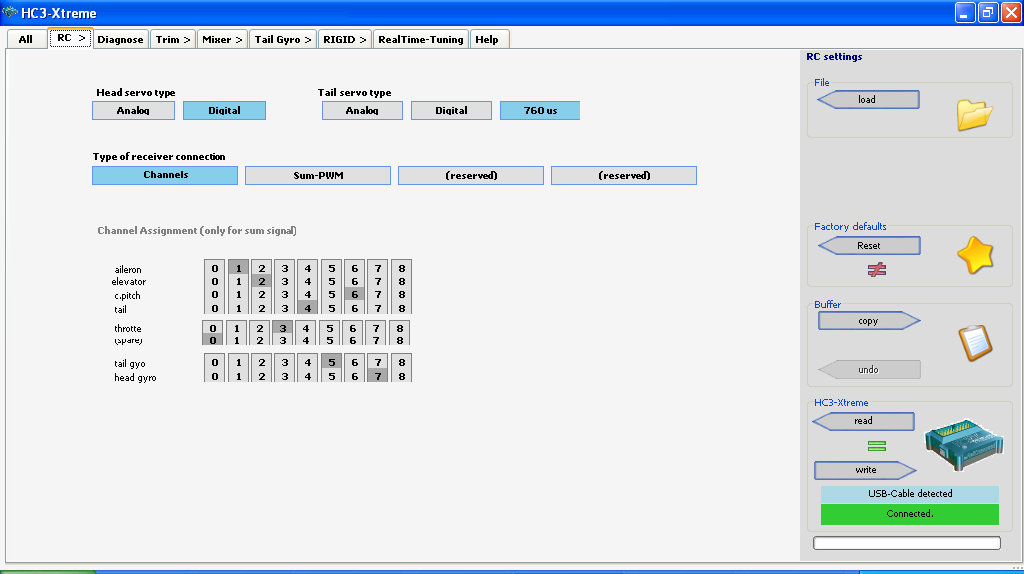
2. RC – zde se nastavuje typ serva cykliky a vrtulky, ale také nastavení typu připojeného přijímače (kanály, S-bus atp., viz obr. RC.)
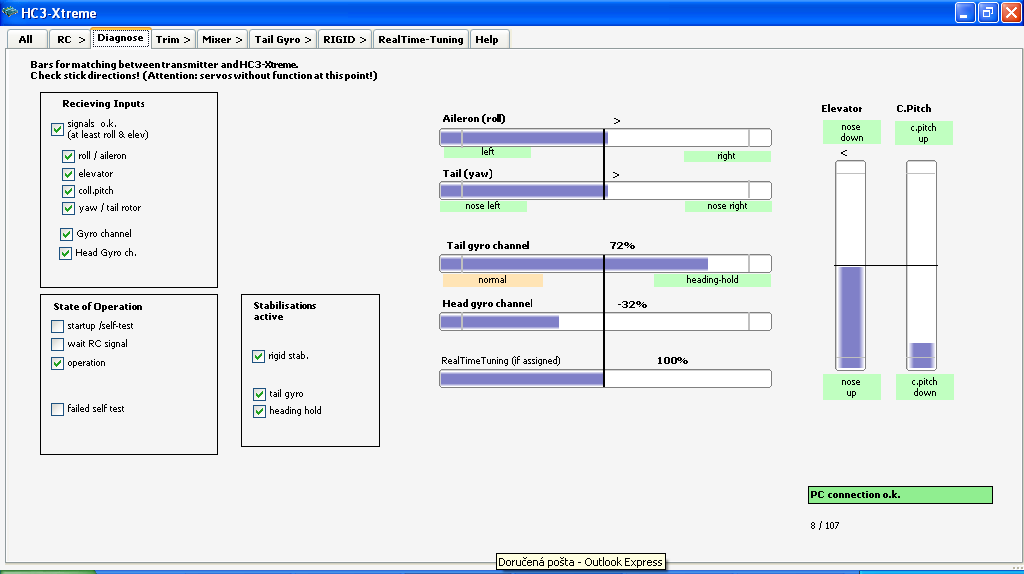
3. Diagnose – slouží k diagnostice stavu Helicommandu a kanálů přijímače (obr. Diagnose.)
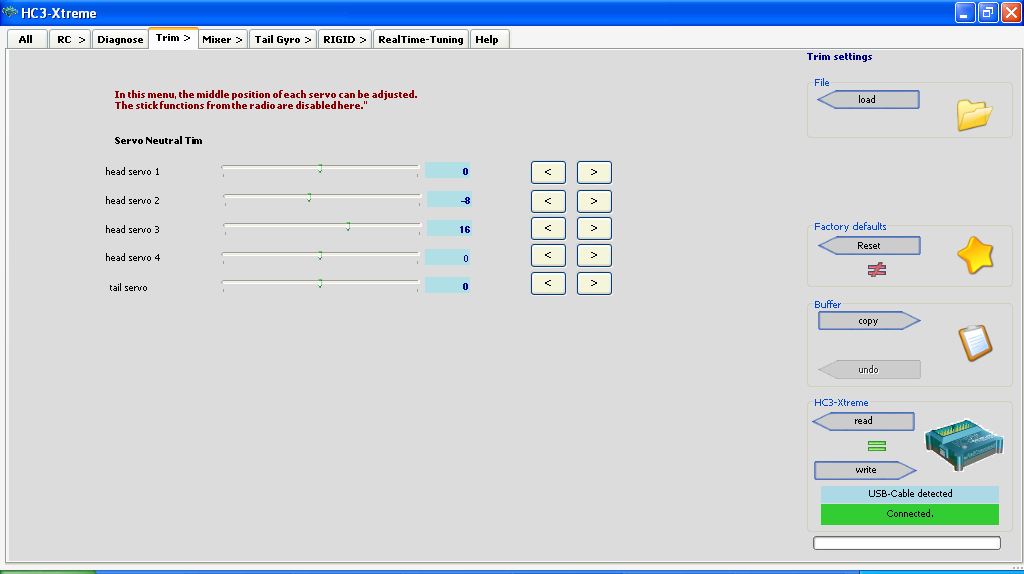
4. Trim – zde se jemně dolaďují neutrály serv (pokud se to nepodařilo už mechanicky obr. Trim.)
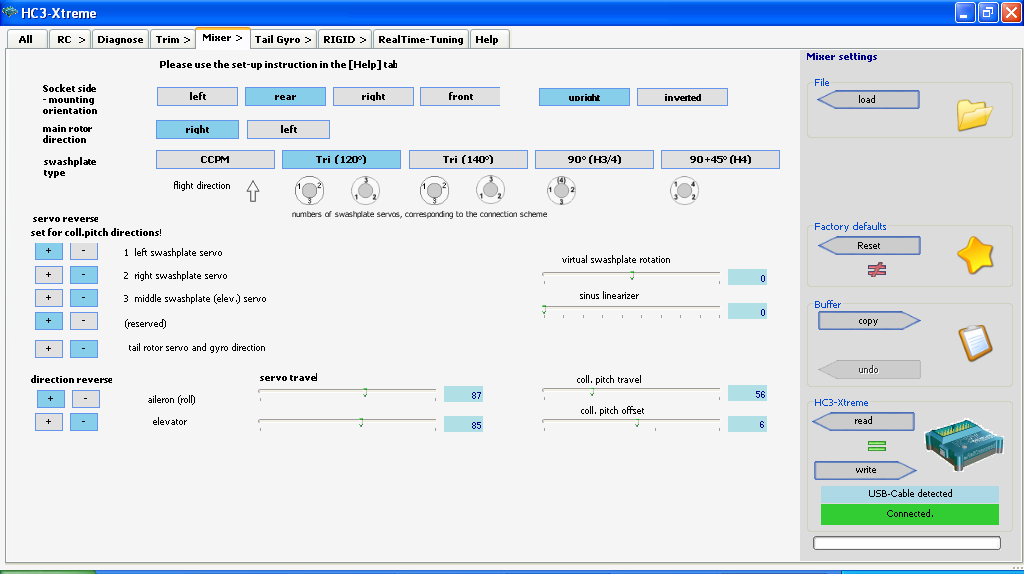
5. Mixer – menu pro nastavení orientace uchycení Helicommandu, nastavení typu cykliky vrtulníku, nastavení správného smyslu ovládání z vysílače, nastavení smyslu reakce Helicommandu, otočení desky cykliky, mechanických dorazů serv cykliky, a rozsahu kolektivu (obr. Mixer).
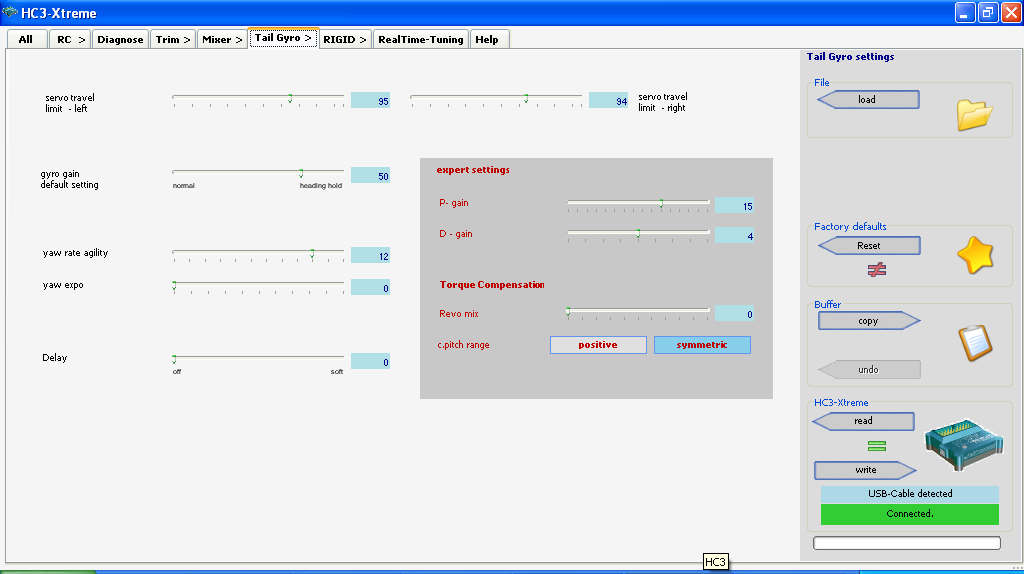
6. Tail gyro – nastavení limitů serva vrtulky na obě strany odděleně, zisk gyra, odezva, exponenciál, a zpoždění. Plus nastavení chování gyra pro experty. Viz obr. TailGyro.
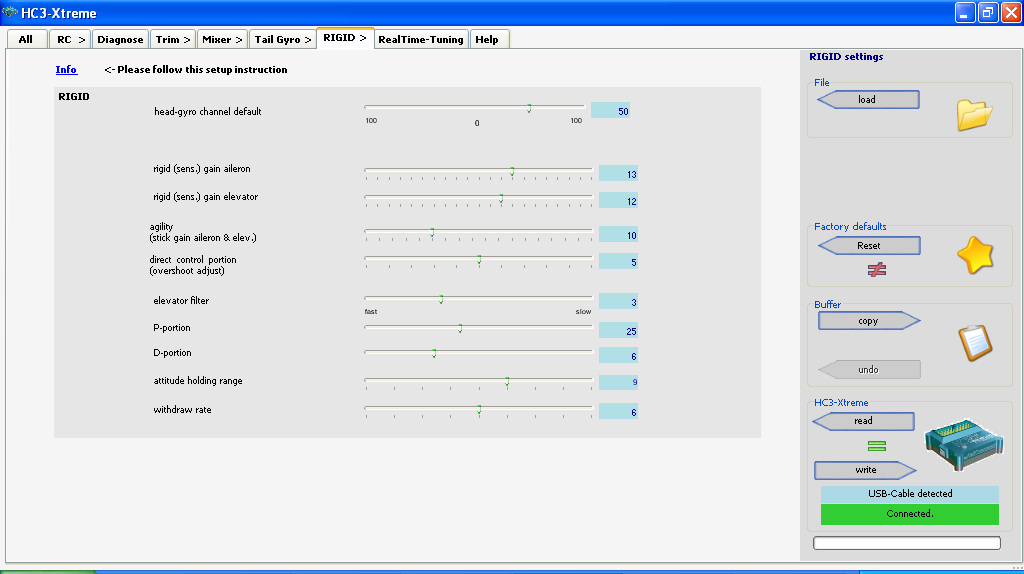
7. Rigid – nastavení chování bezpádlového systému (viz obr. Rigid.)
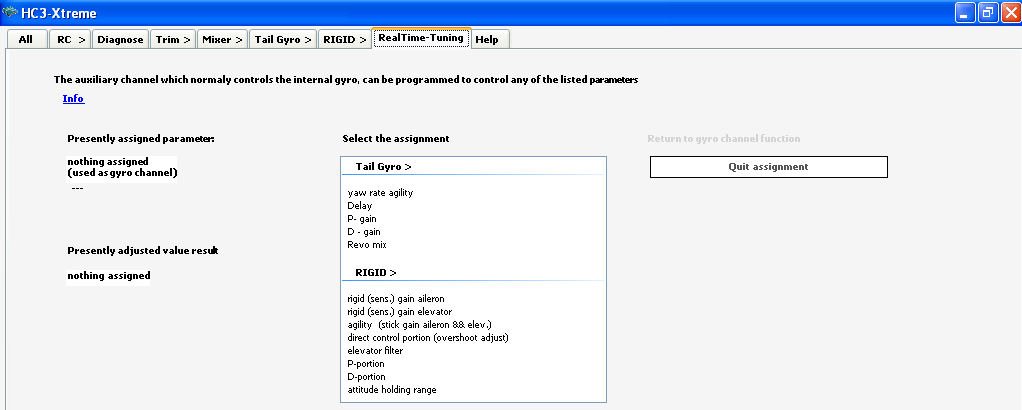
8. RealTime Tuning – přiřazování jiných nastavení ovladači zisku gyroskopu pro možnost ladění parametrů za letu (obr. RealTime.)
V helpu nastavovacího programu jsou uvedeny i krátké rady, jak postupovat v případě různých problémů, která nastavení je třeba měnit atp.
Po kompletní instalaci a inicializaci Helicommandu jsem byl zvědav na letové vlastnosti. Nejprve jsem zařízení testoval v menším elektrovrtulníku – Protosu. Hlavu jsem použil originál bezpádlovou z Protosu. Při vzletu se chová Helicommand velice způsobně, oproti některým jiným flybarless systémům nemá snahu se při roztáčení rotoru převrhnout už na zemi. Vrtulník létal hned po startu dost dobře, pouze vrtulku jsem musel trochu doladit – při rychlém letu ocasem napřed tento trošku „plaval“. Po doladění bylo už gyro v pohodě. Dále jsem po několika startech trochu zvětšil hodnotu „agility“, čímž jsem zvýšil obratnost. Letové vlastnosti pak byly velmi příjemné, největší rozdíl oproti Protosovi s padly byl poznat za větru, kdy vrtulník mnohem lépe držel „stopu“.

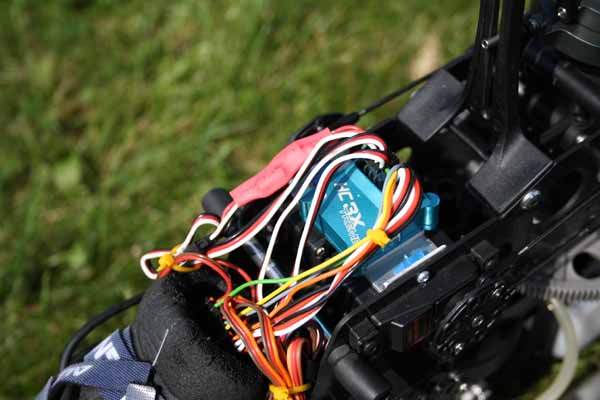
Další testování proběhlo na Trex 600 Nitro, což je vrtulník se spalovacím motorem třídy 50. Bezpádlovou hlavu jsem použil originál Align (obr. Hlava Trex600). Helicommand jsem osadil do jediného použitelného místa – nad serva cykliky (obr. Montáž HC3 na Trexovi 600N). Bohužel, Trex má velice nevhodně navrženo uspořádání elektroniky, takže pokud má třeba přijímač konektory vyvedeny kolmo k podélné ose, tak se opírají o kabinu. Bohužel, stejný problém byl i s Helicommandem – káblíky se opírají o kabinu, a proto jsem měl strach, že bude Helicommand negativně ovlivňován vibracemi kabiny. Naštěstí se mé obavy nepotvrdily. Helicommand jsem před nastavováním nejprve zresetoval do továrního nastavení, a celý postup inicializace provedl znovu. Zkušební lety ukázaly vynikající obratnost vrtulníku už v základním nastavení. Vrtulkové gyro fungovalo také dobře, přesto jsem jej malinko dolaďoval pro lepší piruety za větru. Letové vlastnosti vrtulníku jsou podle mne nyní mnohem příjemnější než originální padlová verze. Dokonce jsou poznat menší nároky na pohon vrtulníku – rotoru méně klesají otáčky, a výkonově náročné prvky jdou létat téměř do nekonečna.
Měl jsem možnost nastavovat několik elektronických systémů pro bezpádlové mechaniky, a Helicommand se podle mne řadí k těm nejméně problémovým při nastavování, a také s velmi dobrými letovými vlastnostmi už po základní inicializaci.

Letu zdar!
Vít Klabačka
Aktualizace: 02. srpna 2010