A nová verze:
Mnoho modelářů se jistě setkalo s problémem, jak zpomalit servo např. pro pomalé vysouvání podvozku, reflektoru atp. Standardně používaná rádia z nižší cenové hladiny touto vymožeností bohužel nedisponují, proto se jako jedno z možných řešení nabízí vložit nějaký modul mezi servo a přijímač, který zpomalení přejezdu serva zabezpečí. Dále popsané zařízení bylo vyvinuto právě pro tento účel.
Decelerator je zařízení, které se připojí mezi servo a přijímač. Servo pak kopíruje polohu určenou ovladačem na vysílači, ale rychlost přejezdu serva určuje právě decelerátor.
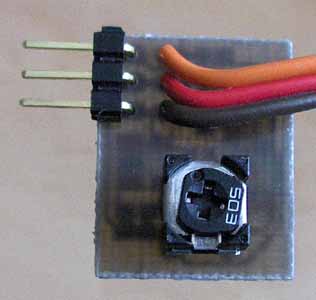
Doba, po kterou má servo přejíždět z jedné polohy na druhou se nastavuje trimrem na decelerátoru. Pro plnou výchylku serva (90°) lze nastavit dobu přejezdu až na cca 20s. Načtení hodnoty z trimru proběhne pouze po zapnutí napájení, proto po změně nastavení trimru je nutné vypnout a zapnout napájení, aby se změna projevila. Tento způsob je zvolen pro zvýšení spolehlivosti zařízení při vibracích v modelu. Přece jen, trimr je nejméně spolehlivou součástkou v zařízení.
Popis funkce
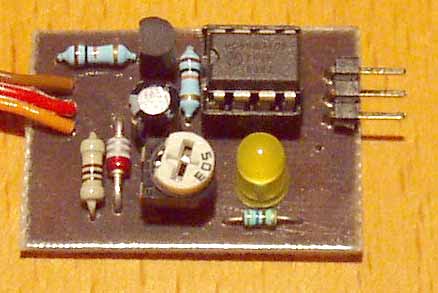
Srdcem decelerátoru je mikroprocesor Motorola HC908QT4 „Nitron“. Ten je napájen přes součástky R3, D2, které slouží jako omezovač max. napájecího napětí při použití pětičlánkové baterie. Rozsah napájecího napětí je přizpůsoben standardnímu napájení přijímače (4-5 čl. NiCd, NiMH).
Pro negaci vstupního signálu jsou použity součástky T1, R1, R2. K indikaci stavu zařízení slouží LED dioda D1 napájená přes rezistor R5. R6 není nutné osazovat, procesor disponuje integrovaným „pull-up“ rezistorem. Spojky SJ1 a SJ2 jsou zkratovány.
Řídící program je napsán v jazyku C tak, aby maximálně využil možností procesoru. Pro měření šířky vstupních impulsů je proto použit integrovaný časovač TCH0 a pro výstup na servo je využit časovač TCH1 v režimu pulsně-šířkové modulace (PWM).
Pro taktování procesoru je využit vnitřní RC oscilátor. Mezi načtením vstupního impulsu a zapsáním výstupního je vložen algoritmus, který zabezpečuje zpomalení serva. Zpomalení se nastavuje trimrem R4. Čím je napětí na vstupu PTA4 nižší, tím rychlejší je přejezd serva.
Osazení a oživení
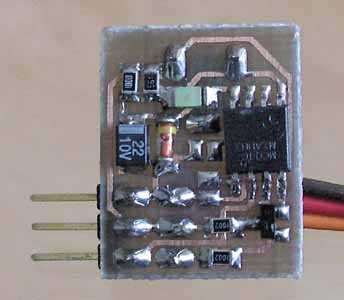
Mikroprocesor osadíme přímo do plošného spoje (patice snižuje spolehlivost). Přívodní káblík zajistíme k plošnému spoji tavným lepidlem, nebo silikonovým tmelem. Trimr R4 je miniaturní, s roztečí vývodů 5x5 mm. Po oživení zařízení umístíme do průhledné smršťovací hadice.
Po dokončení zařízení a vizuální kontrole připojíme napájecí napětí (4 až 5 článků NiCd, NiMH), zatím ještě bez signálu z přijímače. Dioda D1 začne rychle blikat, což znamená, že zařízení bylo zapnuto bez přítomnosti vstupního signálu. Odběr zařízení by neměl převyšovat 25mA při rozsvícené LED diodě. Po připojení zařízení na přijímač se signálem pro servo začne zařízení pracovat, a na výstupu pro servo se objeví signál. LED dioda pak bliká v asi v 1s intervalech a délkou záblesku indikuje šířku vstupního impulsu - čím kratší impuls, tím kratší záblesk. Pokud je vstupní signál mimo toleranci, přibližně 1 až 2ms, tak dioda trvale svítí a ani servo mimo uvedenou hranici nevyjede.
Program pro procesor lze pro osobní potřebu zdarma stáhnout níže.
Parametry:
Napájení 4-5čl. NiCd, NiMH
Odběr 25mA
Rozsah impulsu serva 1 - 2 ms
Zpomalení 0 - 20s
Rozměr 24x35mm
Schéma, osazovací výkres, plošný spoj, program ve formátu s19.
Pozor! Nepracuje se zařízeními typu Hitec HS-75BB a podobnými. Jedná se totiž o tzv. podvozkové servo, ale s klasickým servem toho moc společného nemá - má pouze dva stavy (jeden nebo druhý doraz), jede si svou vlastní rychlostí, kterou nelze ovlivňovat. A podle mne má i nevhodnou vlastnost - v krajních polohách je motor bez napětí, tudíž není zaručena poloha, a lze pákou serva volně pohybovat.
Aktualizace: 30. prosince 2006