
Rambo Profi
(verze s kolektivem)
Před několika měsíci jsem si pořídil elektrovrtulníček Rambo Profi (výrobce Antonín Laštuvka), tedy verzi s kolektivním řízením rotoru. Vrtulník jsem obdržel kompletně sestavený, zbývalo pouze osadit letovou elektroniku (serva, gyro, regulátor, přijímač atd.)
Skelet trupu je slepen ze sklolaminátových desek a tvoří základní díl. Podvozkové nohy mají velký rozchod, což zajišťuje vysokou stabilitu při prvních pokusech o start a přistání. Na skeletu jsou vyčleněna místa pro přilepení serv, gyra i přijímače. Všechny tyto plochy byly na mém vrtulníku již polepeny oboustrannou samolepící páskou, ze které stačilo pouze strhnout vrchní ochrannou fólii a přitisknout servo, nebo gyro. Do skeletu je ještě nutné namontovat elektromotor (standardně Speed 300) pomocí dvou šroubků a distančních sloupků. Předtím je nutné na hřídel elektromotoru nalisovat pastorek (10 zubů). Pastorek je vhodné protáhnout vrtákem o průměru 2mm, aby se na hřídeli příliš „nenafoukl“. Zubová vůle mezi pastorkem a hlavním ozubeným kolem by měla být neznatelná, ale při protáčení nesmí být citelný zvýšený odpor. Serva jsou na skeletu přilepena na takových místech, že motor není problém kdykoliv vymontovat.
Ve skeletu je osazena a jemně přilepena ocasní trubka, uvnitř které je veden náhon ocasní vrtulky (uhlíková struna). Struna je poháněna pomocí kuželového pastorku z hlavního ozubeného kola. Na konci ocasní trubky je domeček vrtulky, taktéž slepený ze sklolaminátových desek. V domečku jsou osazena kuličková ložiska pro hřídel vrtulky, která je poháněna přes úhlový ozubený převod 90°. Kompletně sestavená vrtulka je na hřídelce zajištěna pomocí dvou šroubků M2, což umožňuje jednoduché seřízení úhlu náběhu listů vrtulky. Servo pro ovládání vrtulky je totiž napevno zalepeno, taktéž táhlo vrtulky má pevnou délku. Při lepení koncovek táhla vrtulky je nutné nastavit takovou délku, aby výstupní páka serva i ovládací páka vrtulky byly kolmé k ocasní trubce.
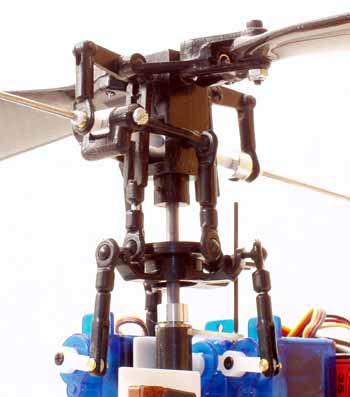
Systém řízení rotorové hlavy je CCPM, tzn. že tři serva přímo ovládají desku cykliky, a pro kolektivní řízení je zapotřebí pohybu všech tří serv najednou. Jinak je řízení rotorové hlavy velmi podobné např. Moskitu. Z tohoto důvodu potřebujeme mít pro řízení modelu počítačovou RC soupravu, která disponuje dostatečným heli programem. Na rotorové hlavě mne zaujalo řešení upevnění příčné spojovací hřídele listů (drát průměru 2mm). V hlavě je válcová díra, kterou hřídel pouze prochází přes silikonovou hadičku sloužící jako pružný člen. Hadička není v hlavě nijak zajištěna proti posunu, pouze třením. Z obou stran silikonové hadičky jsou navlečeny distanční trubičky a dva páry kuličkových ložisek. Vše je na hřídelce zajištěno samojistícími maticemi M2. Podle míry utažení těchto matic můžeme nastavovat „tvrdost“ hlavy. Na kuličkových ložiscích jsou osazeny unašeče rotorových listů.
Transparentní růžová lexanová kabinka zásadním způsobem usnadňuje orientaci při létání s takto malým vrtulníčkem. Vtipně je také vyřešeno zajištění kabinky proti odpadnutí – dvěma malinkými kousky bužírky navléknuté zvenku na uhlíkovém nosníku kabinky.

Serva. Pro řízení jsem použil serva Hitec HS-55 a na vrtulku rychlejší HS-50.
Gyro jsem měl původně CSM180, ale měnící se výkon pohonné jednotky za letu neustále ovlivňoval nastavení revo-mixu. To mi dosti vadilo, proto jsem osadil gyro disponující módem Heading Lock (3Dgyro od Robbe). Pro snížení hmotnosti jsem samozřejmě odstranil krabičku, vodiče nahradil kratšími a gyro zatavil do smrštitelné bužírky.
Regulátory motoru jsem vyzkoušel dva. MGM SMM 08 heli a Tema Supra 8 heli. První z uvedených považuji pro použití v elektrovrtulníčku jako nevhodné. Regulátor je totiž nutné při každém zapnutí zkalibrovat (minimální plyn - maximální plyn). Podle mne je to naprosto zbytečná procedura, a za jistých okolností obtížně proveditelná. Představme si situaci, kdy máme naprogramován letový režim 0 tak, že při minimu kolektivu je 0% plynu, ale při maximu kolektivu nemám plný plyn (např. jen 90%). V další letové předvolbě mám minimum 40% plynu, a maximum 100%. A ještě jinak ve třetí předvolbě. Bez několikerého přepínání přepínačů a pohybu páky kolektivu nejsem tedy schopen regulátor zkalibrovat. Při použití regulátoru Tema Supra 08heli jsem od programování při zapnutí ušetřen (programuje se pouze jednou) a můžu ihned létat.
Přijímač. Vzhledem k potřebnému počtu ovládacích prvků musíme použít šestikanálový přijímač. Po špatných zkušenostech s mikropřijímačem Robbe RX600 v podobném vrtulníku (po odlétnutí do vzdálenosti 30m serva silně pocukávala) jsem se rozhodl pro použití nějakého kvalitnějšího mikropřijímače. Volba padla na Potensky Nano Smart 7. Příjem a vybavení signálu je nesrovnatelně lepší i na větší vzdálenost, než s předchozím přijímačem. Výrobcem udávaný minimální dosah ve vzduchu je 600m. Vliv na uvedené parametry určitě má i zabudovaná digitální filtrace signálu (mikroprocesorem).
Bohužel jsem zjistil, že robbe 3Dgyro s tímto přijímačem nespolupracuje. Po zapnutí napájení totiž přijímači trvá asi 1s než se zinicializuje (na výstupech se objeví signály pro serva). Pokud gyro nezjistí několik desetin sekundy po zapnutí napájení přítomnost signálu, tak přejde do chybového stavu a nezinicializuje se. Naštěstí se to dalo vyřešit rozpínacím mikrospínačem v obvodu napájení gyra. Po zapnutí napájení přijímače a jeho následné inicializaci stlačím na chvíli mikrospínač, čímž přeruším napájení gyra. Po uvolnění mikrospínače se gyro zinicializuje v pořádku. Z mého pohledu je to problém přijímače, protože pokud vím, tak se žádný jiný přijímač takto nechová (PPM ani PCM).
Akumulátory jsem vyzkoušel dvojí : GM600 a GM1000. Vždy šlo o sedmičlánek. S prvními se doba letu pohybuje okolo 6 minut, s druhými 8-9 minut. Sada GM1000 je bohužel o cca 50g těžší a vrtulník působí ve vzduchu trochu těžkopádně. Poněvadž jsem chtěl s vrtulníkem létat i akrobacii, tak jsem zůstal u lehčích GM600.
Zalétávání. Zpočátku jsem měl se seřizováním a zálétáváním vrtulníčku velké problémy, než jsem já neelektroletec zjistil, že akumulátory nemohu mít nabity den dopředu! Má-li let za něco stát, tak musíme s vrtulníkem vzlétnout do 15 min po ukončení nabití accu. Po této době jsou akumulátory „lenivější“. Pokud to dodržíme, tak výkon celé jednotky bude dostatečný, a po větší část doby letu přibližně stejný.
Pro zalétávání si vybereme dostatečně velkou a rovnou plochu, např. hřiště. Jakákoliv nerovnost může vést k poškození vrtulky atd. Plocha musí být bez překážek, a o rozměru alespoň 5x5m. Než si na vrtulník zvykneme, bude nejspíše poletovat z rohu do rohu.
Křivku plynu jsem nastavil tak, aby rotor točil cca 2000 ot./min. ve visu. Vrtulník pak pěkně reaguje. Maximum kolektivu nesmí být nikterak velké. Při plném kolektivu by měl vrtulník relativně pomalu stoupat. Pokud nastavíme větší kolektiv, a v krizových situacích „vezmeme“ za kolektiv, tak rotor prakticky zastavíme. To se rovná zbytečnému pádu. Uvedeným nastavením sice o několik sekund zkrátíme dobu letu (vrtulník už nechce viset), ale let je bezpečnější.
Velikost výchylek cykliky nastavíme dle vlastních zvyklostí. Po nastavení zisku gyra a letových předvoleb jsem přikročil k letům po obloze. Za letu je vrtulníček relativně stabilní, vis je třeba natrénovat. Je také třeba si uvědomit, že let je energeticky méně náročný než visení, a proto je důležité přistát o trochu dříve, než když už vrtulníček nechce letět (vybité accu). Pokud v této situaci zastavíme, tak se vrtulníček zřítí k zemi! Výkon pro vis už totiž není k dispozici. Nicméně i v tomto případě se dá bezpečně přistát – musíme letět a přistávat jako s letadlem, tedy za dopředného letu.

Tuningy. Vyzkoušel jsem i několik tuningových dílů. Prvním z nich byla volnoběžka pohonu rotoru. Změna se projevila větší pohodou letu. Druhým tuningem byla uhlíková vrtulka. Odezvy na ovládání vrtulky se okamžitě zlepšily. Po výměně řídící páčky vrtulky za tuningovou páčku s ložiskem se zmenšily vůle v řízení a odezvy na řízení vrtulky se ještě více zlepšily.
Nakonec jsem osadil uhlíková padla. Reakce cykliky se téměř zdvojnásobila, což mne přivedlo na myšlenku vyzkoušet některé prvky akrobacie. Výkruty jdou zalétnout překvapivě dobře, s přemetem je to trochu horší. Padla jsou totiž příliš lehká, a stačí velmi malý závan větru a vrtulník se okamžitě „vzpíná“. Let na zádech je také relativně stabilní, i přes velmi nízko položené těžiště.
V současné době výrobce dodává i polosouměrné listy hlavního rotoru. Ty sice neumožňují, nebo znesnadňují, zalétnout některé akrobatické prvky, ale vyznačují ještě vyšší stabilitou a délkou letu. Pro průměrného pilota ideální volba.
Výkony modelu lze zvýšit použitím výkonnějšího motoru (střídavého). To je ale dost velký zásah do peněženky vzhledem k celkové ceně vrtulníčku, a je na pilotovi, aby zvážil, zda to pro něj má smysl.
Závěr. Musím říci, že letové vlastnosti mne překvapily. Očekával jsem dost nestabilní a vrtkavý vrtulník (vzhledem k velikosti), který bude stěží viset ve vzduchu, ale létání je relativně příjemné. Také odolnost vrtulníčku při haváriích je obdivuhodná. S vrtulníčkem jsem mnohokrát havaroval (při pokusech o akrobacii, nebo došla energie v accu), nicméně většinou to „odnesl“ pouze pastorek motoru a ohnutá spojovací hřídel rotoru. Jednou jsem zlomil nohu podvozku. Listy ani ocasní trubku se mi zatím nepodařilo přerazit (a doufám, že to tak i zůstane).
Velikost, zdánlivá jednoduchost, by mohly svádět k pořízení tohoto modelu jako první model vrtulníku. Obávám se však, že moc vhodný pro začátečníka není. Pravidlo je podobné jako u letadel – malé modely nejsou vhodné pro výuku létání. Navíc se jedná o funkčně plnohodnotný vrtulník, na jehož seřízení je třeba mít zkušenosti.
Letu zdar!
Vít Klabačka
Aktualizace: 10. srpna 2003